1. STRATEGIJA PRI SPUŠČANJU ROBOTA
Naredi se natančen plan poti na listu. Razmisli kakšne senzorje boš potreboval pri določeni misiji in kakšne nastavke. Poskusi planirati čim nanj krogov. Pri zadnjem krogu lahko robot ostane kjer koli na polju. Izpolni tabelo in jo dopolnjuj.

2. IZDELAVA ROBOTA ZA FLL TEKMOVANJE
Narediš svojo kocko robota, ki ima (2 svetlobne senzorje, gyro senzor, lahko tudi stikalo ali ultrasonični senzor), od pogona uporabiš 2 pogonske motorje in za nastavke še dva (sredinska motorja ali pogonska). Če želiš, da robot sledi črti tudi vzvratno je potreben še en dodatni svetlobni senzor na drugi strani, se pravi zadaj (potrebuješ tri svetlobne senzorje). Pomembno je, da je robot narejen tako, da lahko enostavno in hitro menjaš nastavke.

3. HITRO SPUŠČANJE
Robota ne spreminjamo spreminjamo samo nastavke!
Izdelaj si nekaj blokov, ki jih boš večkrat uporabil (sledenje črti – svetlobni, obrat na določeno stopinjo – gyro, sledi naravnost – gyro, …)
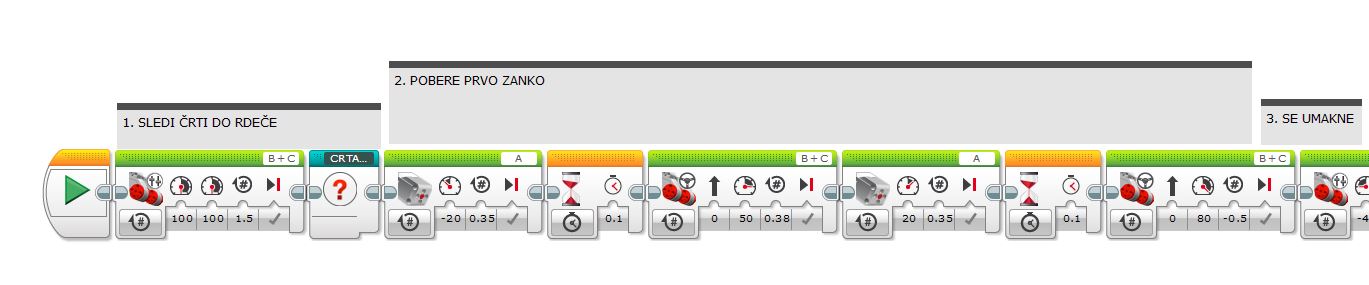
Na koncu vsak program kroga damo v svoj blok (1. krog, 2. krog …) in ga vključimo v master program, kjer s klikom na robotu skačemo na naslednji krog.

FLL PROGRAMI
1. POSPEŠEVANJE
Da ne pride do spodrsavanja postopno povečujemo hitrost motorja z uporabo matematike in zanke.
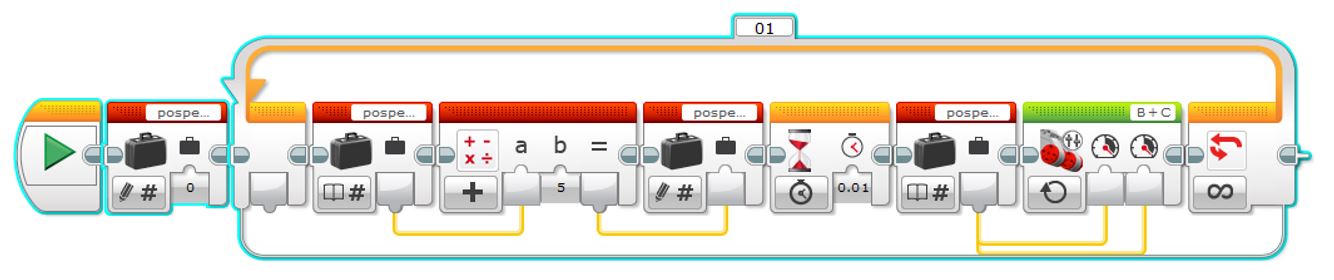
RAZLAGA:
Neznanka POSPEŠEK, ima vrednost na začetku 0, potem pa se v zanki preko matematičnega obrazca a+b za 5 povečuje vsake 0.01 sekunde. To pomeni, da je v 0,1 sekundi hitrost motorja 50 enot se pravi v 0,2 sekundah 100 kar je največ.
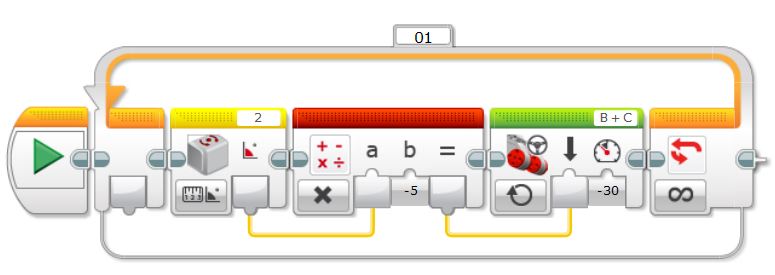
2. SLEDENJE ČRTI
a) Enostavno sledenje črti.
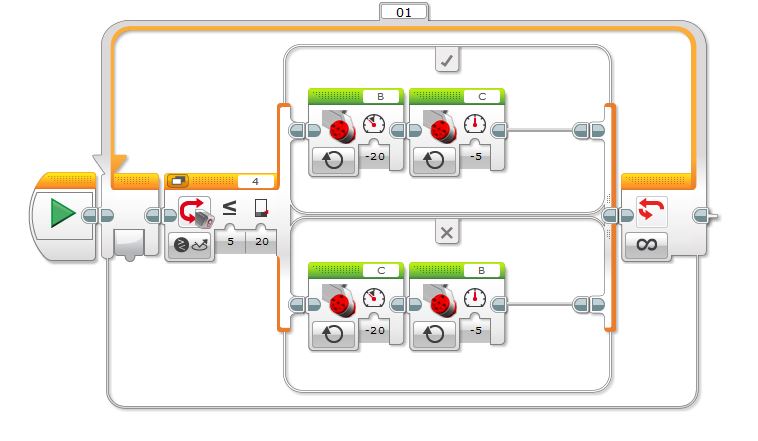
RAZLAGA:
Če je želena vrednost na senzorju 20 (siva – rob med belo in črno) ali več se izvede zgornji blok, drugače spodnji. V zgornjem bloku robot zavija v eno smer, v drugem bloku pa v drugo smer. Glede na črto določimo kakšne so številke na B in C motorju. Če želimo gladko sledenje črti, ki je ravna ali se počasi ukrivlja, je razlika majhna npr -20, – 5 (pri vašem robotu pozitivne številke). Če je črta cik cak večji razpon npr -30, -5
b) Enostavno sledenje ravni črti s steering motorjem (volanček).
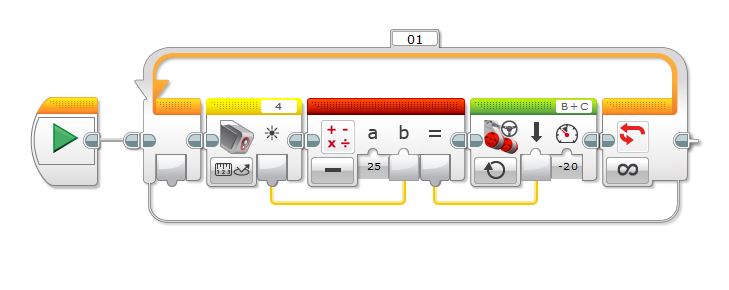
RAZLAGA:
Svetlobni senzor zaznava odbito svetlobo, ki jo v rdečem bloku (matematiki) odšteje od želene vrednosti 25 (siva med črno in belo). Če je rezultat 0 gre naravnost, drugače zavija v desno ali levo. V tvojem primeru bosta vrednosti v matematiki zamenjani a iz senzorja in b npr. številka 25. Tudi smer vrtenja motorja bo v tvojem primeru verjetno pozitivna.
c) Z enim senzorjem sledimo sredini črte. Če je robot poravnan s črto gre čim bolj ravno in hitro, če je oste kot pa se robot oddalji od črte pa je počasnejši in bolj agresivni program spodaj.
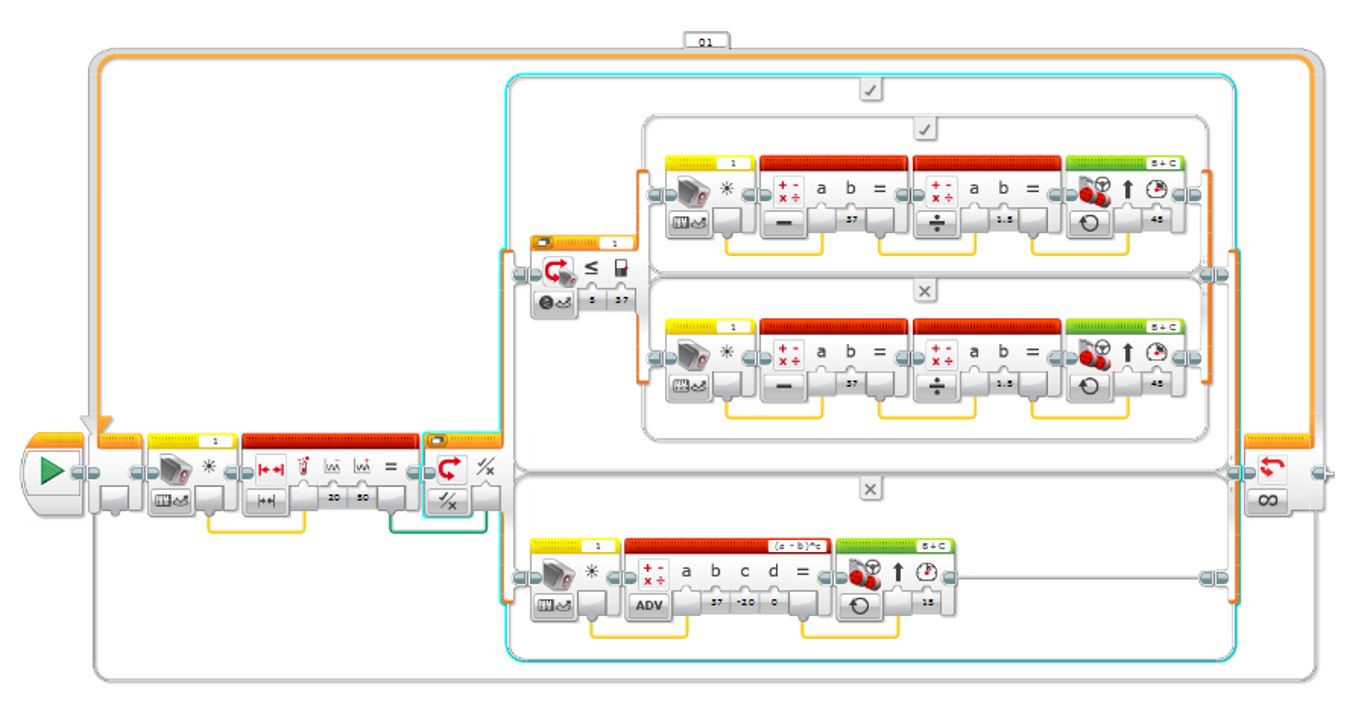
RAZLAGA:
Če je odboj svetlobe v mejah sredinske črte 27 med 20 in 50 se izvede zgornji program, ki elegantno vjuga po ravni črti, če pa ne pa po spodnje, ki je bolj agresivna in cuka.
3. DOMET
Blok za določitev dometa robota z vnosom razdalje v centimetrih.

4. VOŽNJA Z GIRO SENZORJEM NARAVNOST
Ne glede na svoj položaj vozi naravnost.
RAZLAGA:
Giro je na začetku 0 stopinj, med vožnjo se ravna volan motorja vedno na giro, kjer vrednost s senzorja giro pomnožimo z faktorjem 5, da robota takoj poravna, tudi če vozi čez ovire.
5. MERILEC ČASA
Svoj program lahko meriš s štoparico, ki se vključi, ko program spustiš in se konča, ko pritisneš eno tipko na kocki.
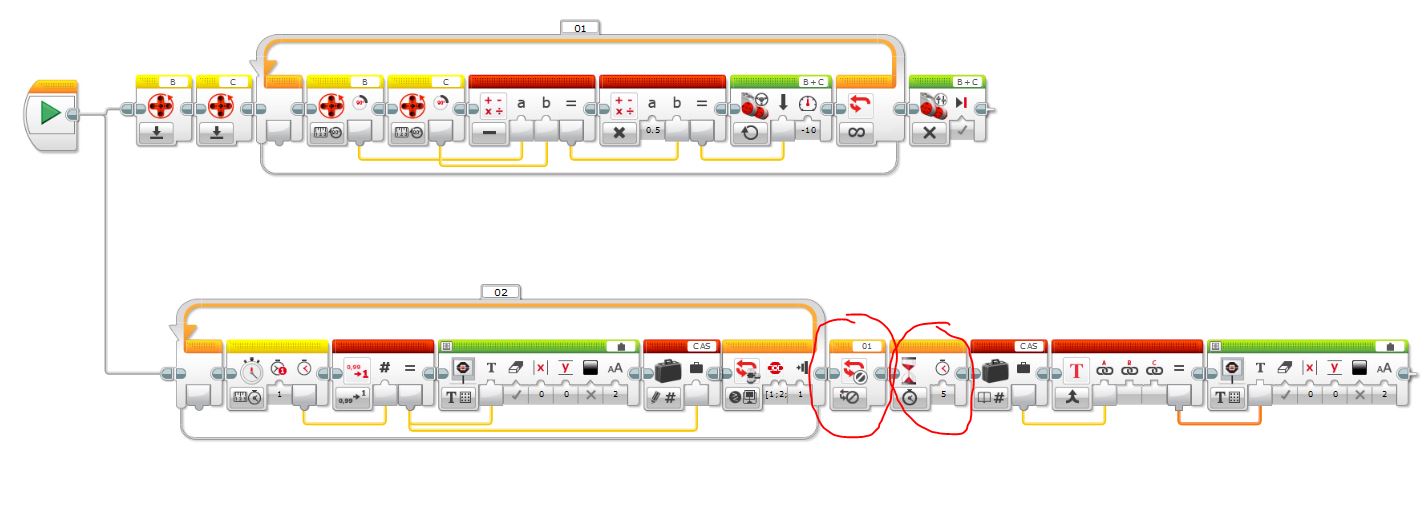
RAZLAGA:
Zgoraj imamo program, kjer se robot vozi naravnost. Spodaj imamo zanko, kjer se čas v rdečem matematičnem bloku spremeni iz decimalne številke v celo številko sekunde, sledi zeleni blok displej grid in vrednost se zapiše tudi v spremenljivko (kovček z imenom CAS). Ko pritisnemo katero koli tipko na kocki se zgornja zanka konča, in motorja B+C se ustavita. 5 sekund imamo še na zaslonu zapisan zadnji čas merjenja.
6. PORAVNAVA ROBOTA NA ČRTO Z DVEMA SENZORJEMA
Ko svetlobni senzor 1 zazna črno črto (npr. sivina 25) se število 25 odšteje od 25 (b), kar je rezultat 0. 0 krat (-0,5) je še vedno 0, zato se motor B ustavi.
Ko svetlobni senzor 4 zazna črno črto (npr. sivina 25) se število 25 odšteje od 25 (b), kar je rezultat 0. 0 krat (-0,5) je še vedno 0, zato se motor C ustavi.
Vse je v zanki, kar zagotavlja, da se robot ustavi, ko sta oba poravnana na črto. Iz zanke izstopi po 5 sekundah.

7. MASTER PROGRAM
Vse kroge združiš v master porgram, kjer se vsak krog (4) začne z klikom na tipko na robotu.
TEHNIČNI INTERVJU – ROBO DESIGN
Pri ocenjevanju robo design, se ocenjuje po ocenjevalnem obrazcu. Spodaj je nekaj opornih točk, kaj naj vsebuje predstavitev. Prikazati pa je potrebno tudi en krog robota in njegovo sigurno delovanje.
1. PREDSTAVITEV CELOTNEGA PROGRAMA
V programu naj bo fotografija robota, kratek jasen opis delovanja in video posnetek.

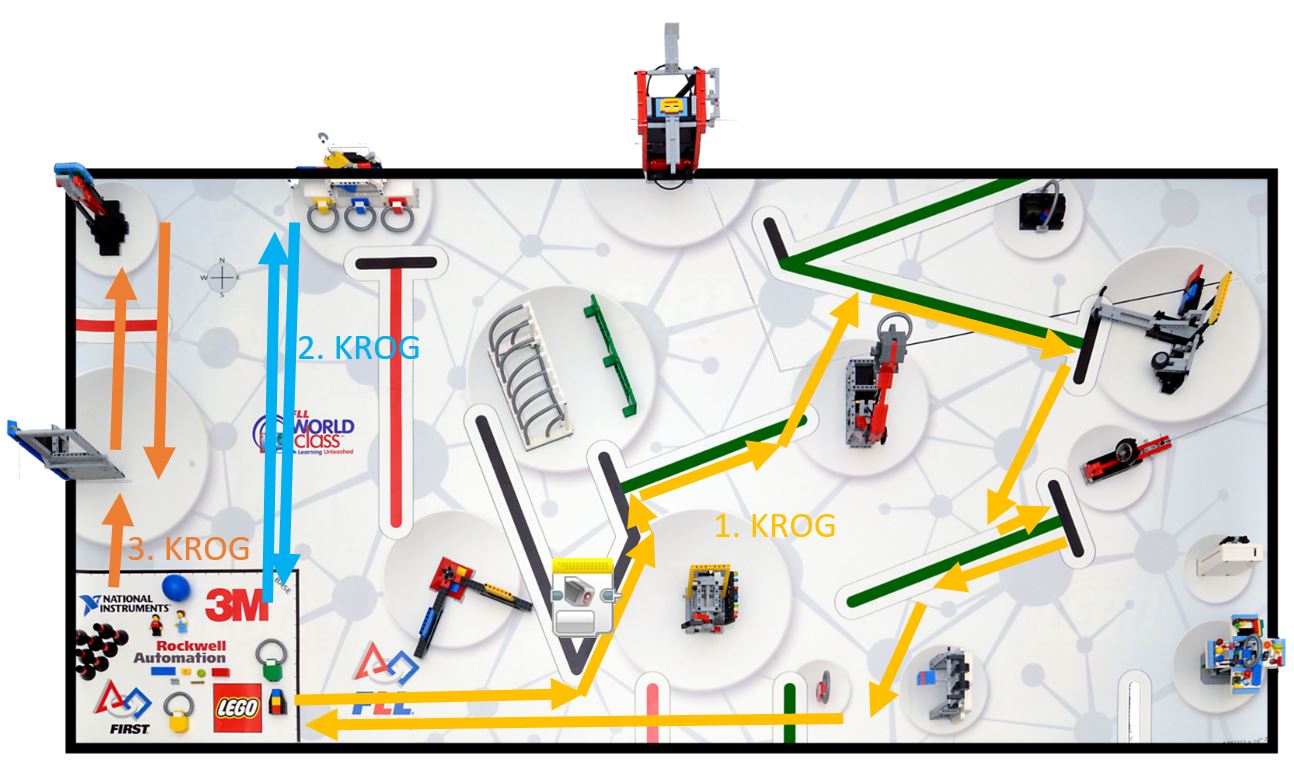
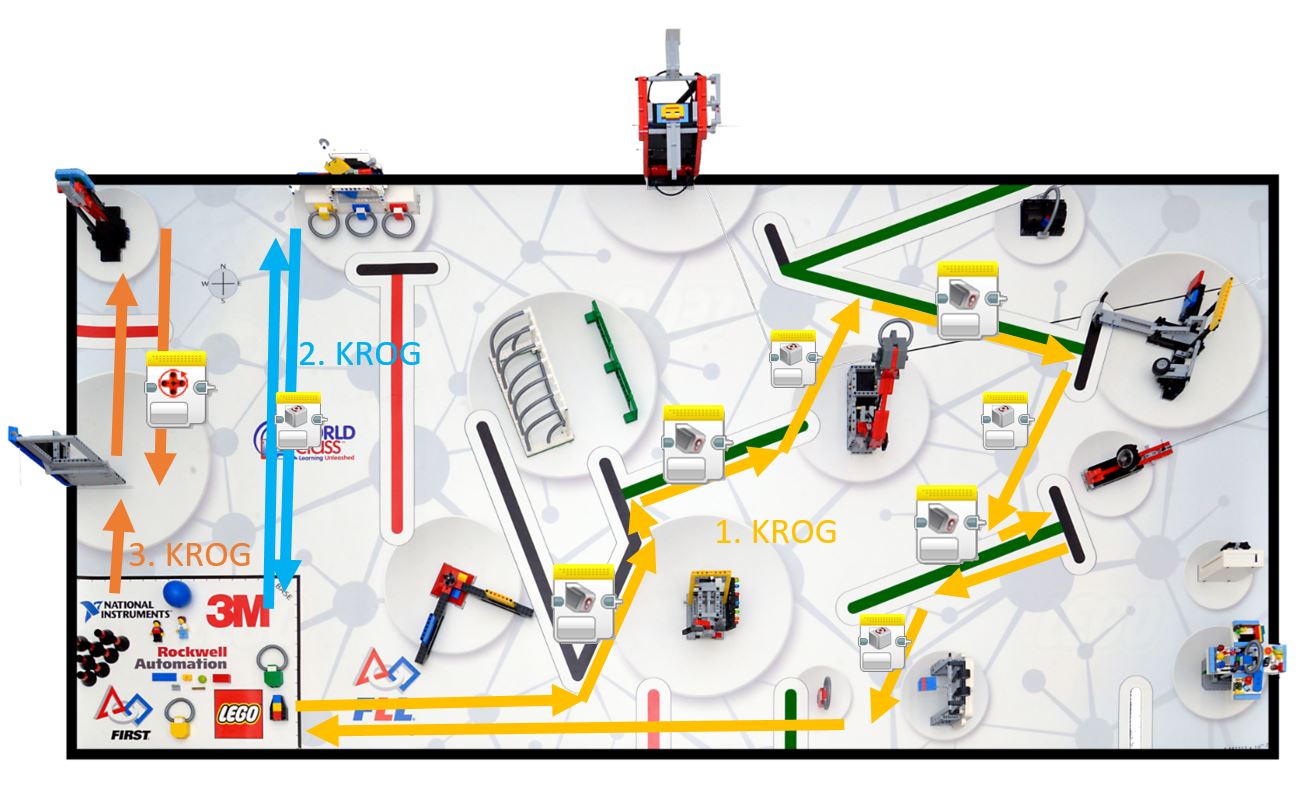
2. PREDSTAVITEV POTEKA KROGOV NA POLJU
Na listu je potrebno označiti kroge, kot je to vidno na spodnji sliki. Na sliki so lahko označene tudi sigurne točke ali ikone, kjer je razvidno kateri senzor se je kje uporabljal.
3. MASTER PROGRAM – GLAVNI PROGRAM
Za večjo preglednost vsak posamezni krog združiš v samostojni blok in vse te bloke vključiš v glavni program.
4. POSAMEZNI PROGRAM IMA KOMENTARJE
Za večjo preglednost vsak posamezni krog združiš v samostojni blok in vse te blok
5. PREDSTAVITEV SOJIH BLOKOV, KI JIH UPORABIŠ VEČKRAT
Spodaj je primer samostojnega bloka, ki omogoča vnos razdalje v centimetrih glede na vašega robota in velikost koles.